

Salut ! J’ai enfin un peu de temps libre pour m’occuper du site et me lancer dans un nouveau build 😉
Avant d’attaquer le build d’un QAV-R Lumenier dédié aux runs, j’avais envie de faire prendre la relève à mon bon vieux Lisam LS 210.
Ce sera donc un build avec le nouveau châssis Emax, le Nighthawk HX 200mm avec des hélices en 5″ !
Le build sera composé de :
- Frame: EMAX NIGHTHAWK HX 200 5″ 3.5mm
- Moteurs: Emax RS2205 2300kv
- ESC : DYS XM30A
- PDB: OSD Matek HUBOSD eco H
- FC : X-RACER F303 V2.1
- TX : FrSky X4R SB (3/16 channels) (EU-LBT)
- Cam FPV : FPV CCD Camera HS1177
- VTX : FOXEER TM200 200mW Raceband
- Antenne PFV : SL PentaRacer 5.8 TERRYBUILD
- LEDS : Matek Cercle de 2 LED Vert 5v (x4)
- Protections moteurs : KINGKONG Universal Motor Cover Protection for 22 Series

Le bundle du Emax Nighthawk HX 200 est plutôt sympa et bien complet.
Merci à fpv4drone.com où j’ai commandé la X-RACER F303, pour leur petit cadeau accompagné d’un message sympa. C’est pas grand chose, mais pour moi c’est important l’attention donnée au client.
Je recommande ce shop !

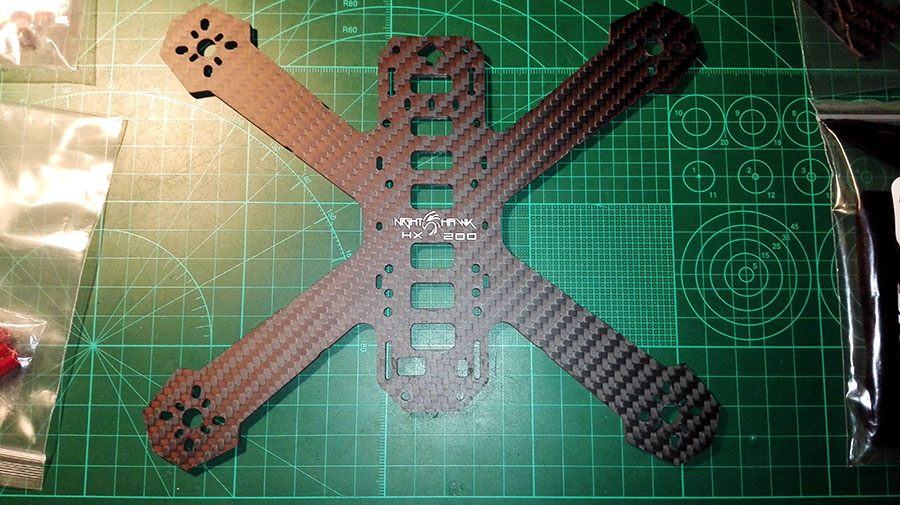
Alors qu’est-ce que nous avons la ?
- Une main plate de 3.5 mm avec une découpe propre, bien finie et visuellement robuste
- Une top plate de 1.5mm accompagnée des plates de la cam FPV
- Un lot d’entretoises en 35, 20 et 8 mm
- Un set de vis M1 et M3
- Sangle et velcro pour Lipo, double face ESC
- 4 protections moteurs (très moches)

Voilà qui est bien sympa pour moins de 45 € !
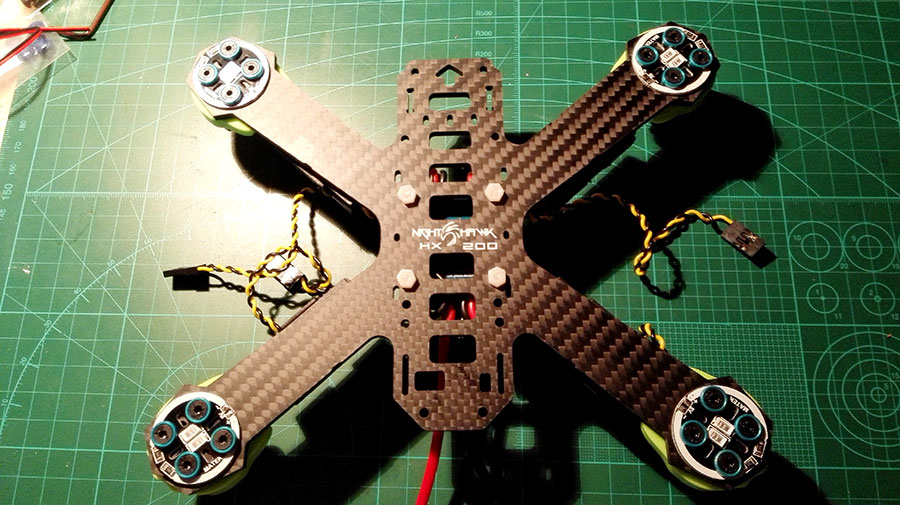
Allez maintenant on monte le châssis à blanc pour voir un peu ce que ca donne !

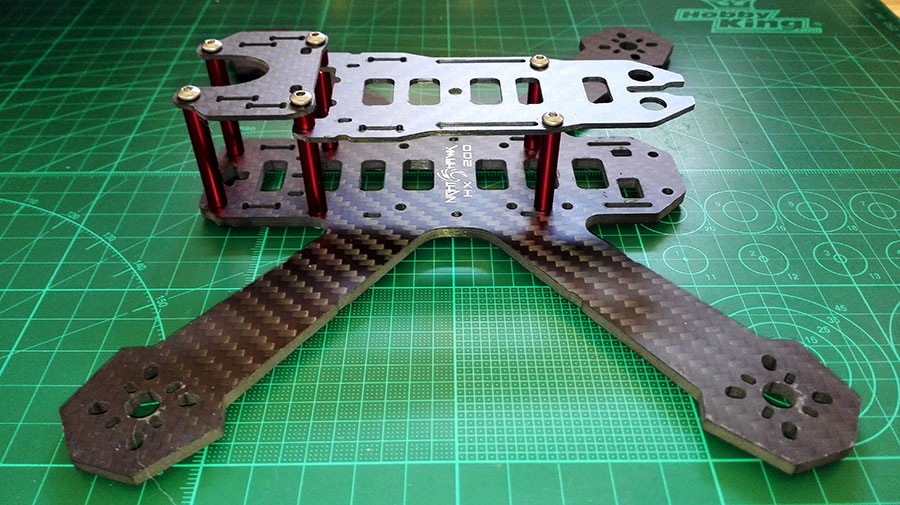
Visuellement ce châssis me plait.
Ce format hybride en H et X, très compact en format 200mm et low profile, il a de la gueule !
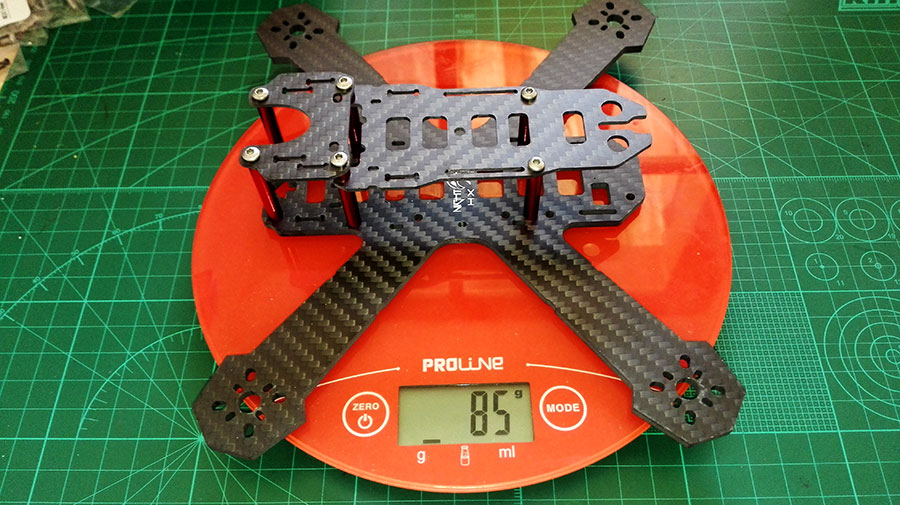
Hoooouuuulaaaaa ! Ca sent bon ça ! 85g avec des RS 2205 ça va déchirer !
Allez, il est temps de rassembler les composants du build et commencer à s’interesser à cette PDB Matek HUBOSD.

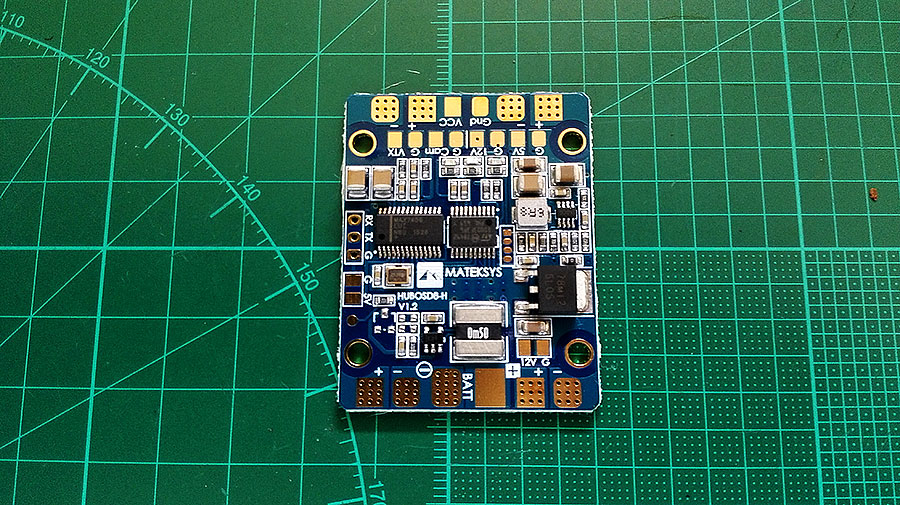
A ma connaissance il s’agit de la première Matek à embarquer un OSD intégré, plus précisément un STOSD8.
Pour voir à quoi ressemble l’affichage du STOSD8, c’est par içi.
Pour consulter le manuel PDF de la PDB, c’est par içi.
Voilà les caractéristiques de la Matek HUBOSD eco H :
- Input voltage range (3S 5S-operation): 8 – 21VDC
- PDB: 4x30A (Max.4x35A)
- 2 x BEC 5V 2A – DC / DC synchronous buck regulator
- 2 x BEC 12V 500mA – linear regulator, low noise, LC Filter is useless
- Current sensor 140A
- Built-in STOSD8
- Pads cam FPV VTX
- 1x serial port (RX, TX, G)
- Dimensions: 46x36x4mm
- Weight: 8.5g
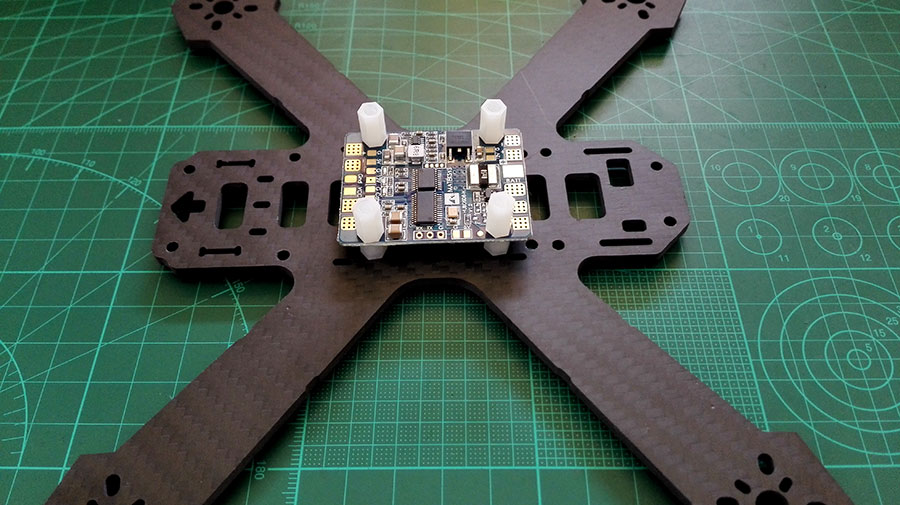
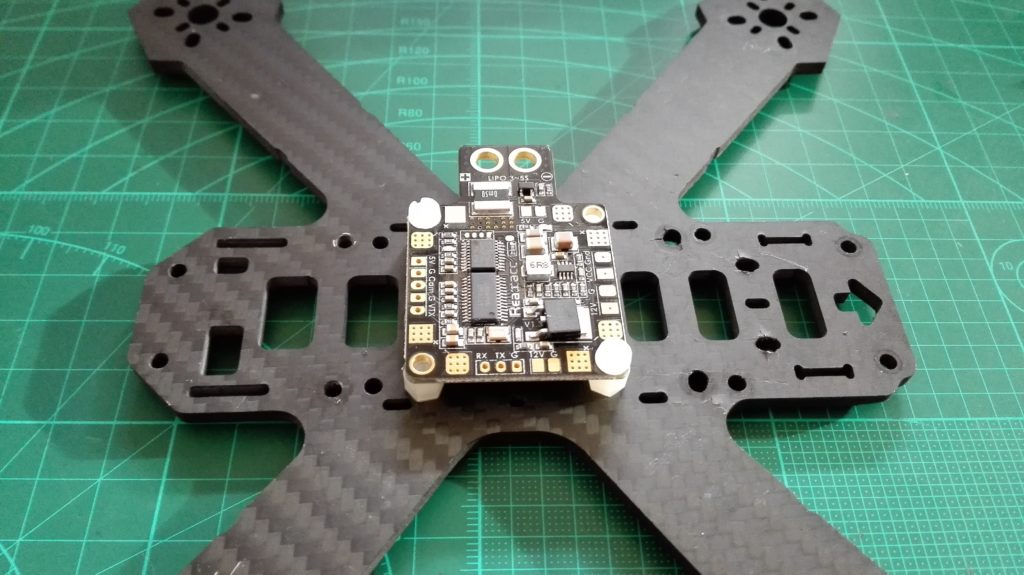
Cette PDB est niquel et bien complète mais un problème se pose avec son format 36×46.
Les entretoises de la top plate ne passent pas comme on peut le voir ci-dessous 🙁
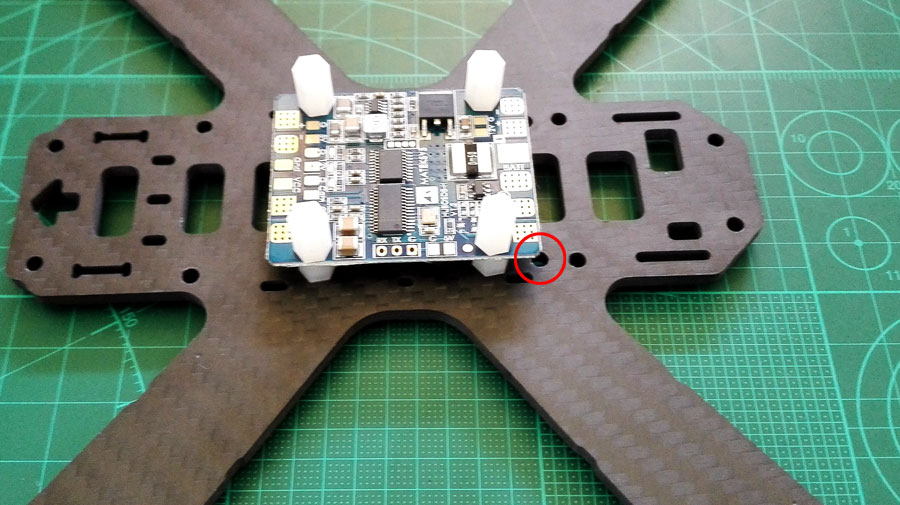
Si on tourne la PDB, les câbles des ESC vont dépasser sur les côtés, reste alors la solution de percer la main plate pour décaller les entretoises vers l’arrière du châssis.
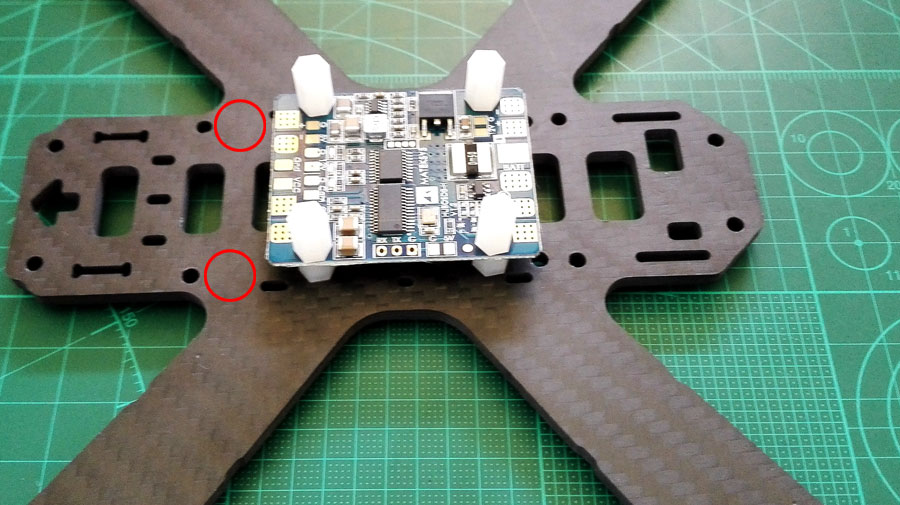
J’ai donc percé deux nouveaux trous en M3 à l’emplacement indiqué sur la photo ci-dessous.
Au final l’ensemble de la top plate est renforcé par l’ajout de deux nouvelles entretoises.
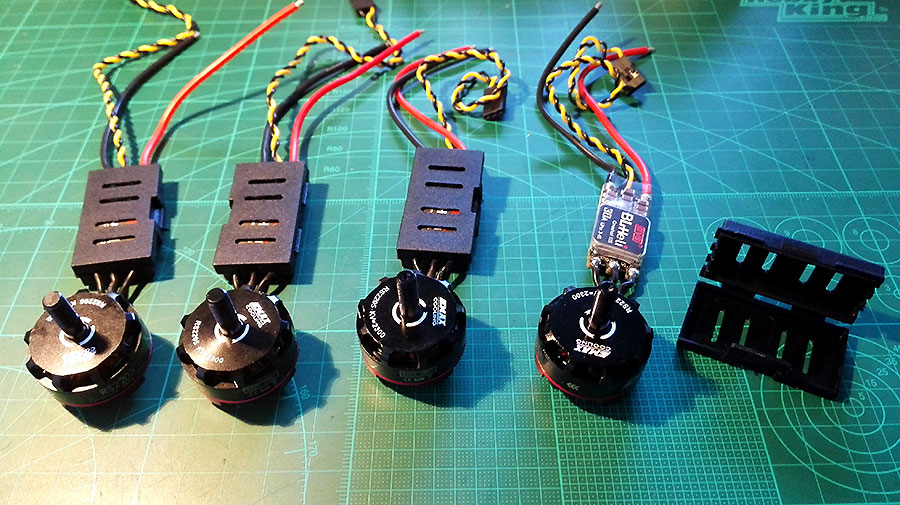
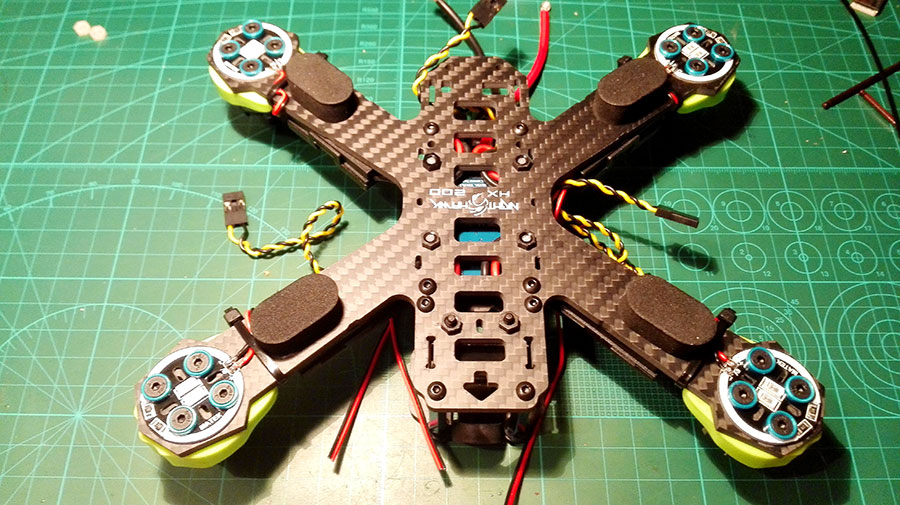
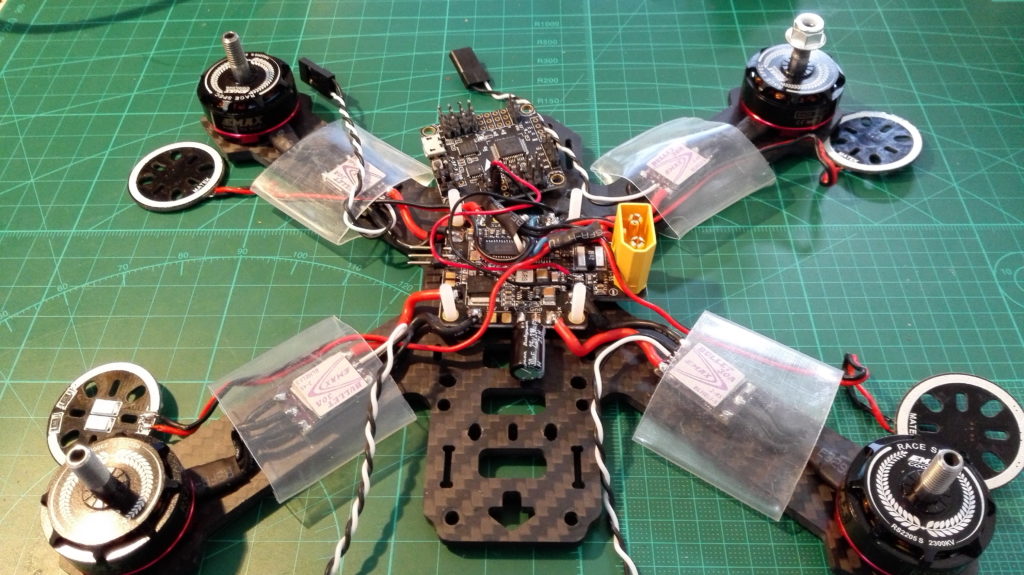
Occupons nous maintenant de préparer les moteurs et les ESC :
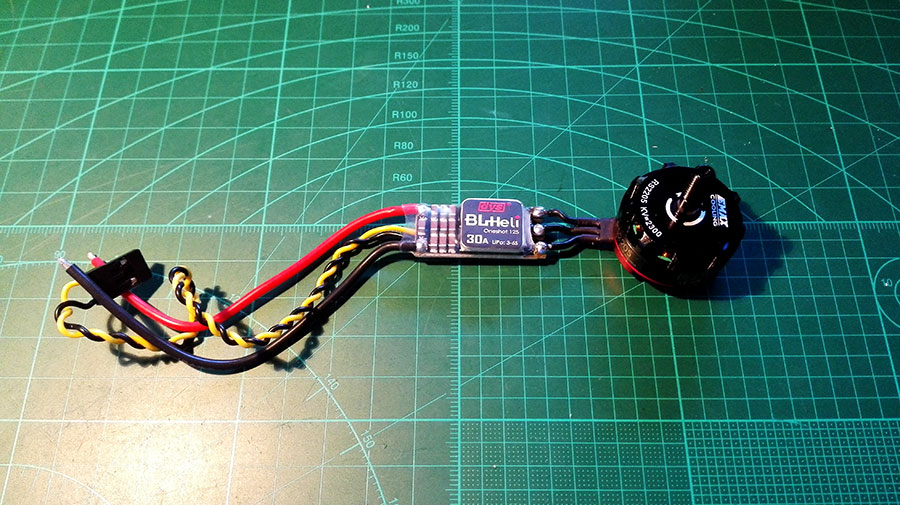
Je vais utiliser les boitiers fournis avec les XM30A, pour bien les protéger des chocs.
Et puis c’est plus joli que de la gaîne thermo 😉
Ca fait petit moment que j’avais repéré ces cercles de LED Matek à fixer sous les moteurs. Je me suis dis que c’était l’occasion de les tester sur le Nighthawk HX 🙂

Elles sont vendues par paires de couleur rouge ou bleu chez Banggood.
Pour ma part je voulais des vertes que j’ai trouvé chez RCTeam.fr.
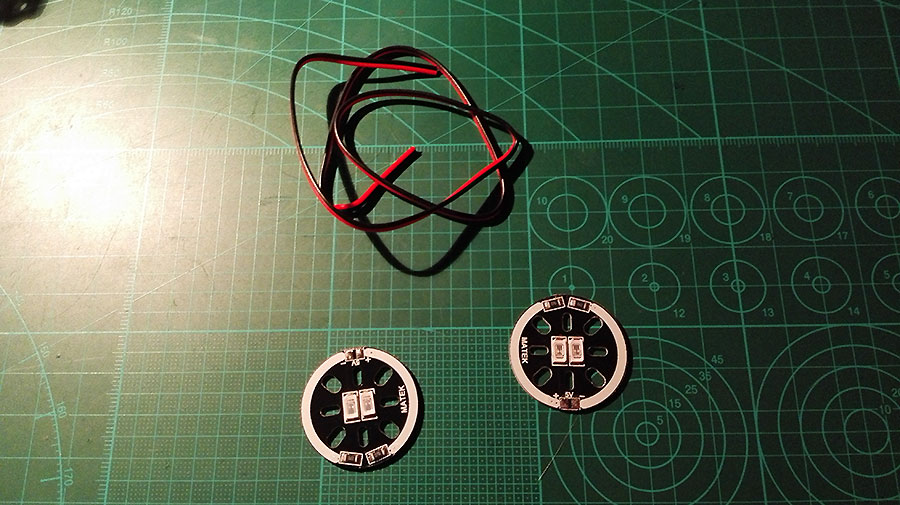
Elles seront accompagnées de protections moteurs KingKong, qui ont fait leur preuves, le tout fixé par des vis M3 x 10.

Mise en place des LEDS…
… et soudures.
Je fait passer les câbles d’alimentation des LEDS dans les boitiers des ESC pour bien les protéger.
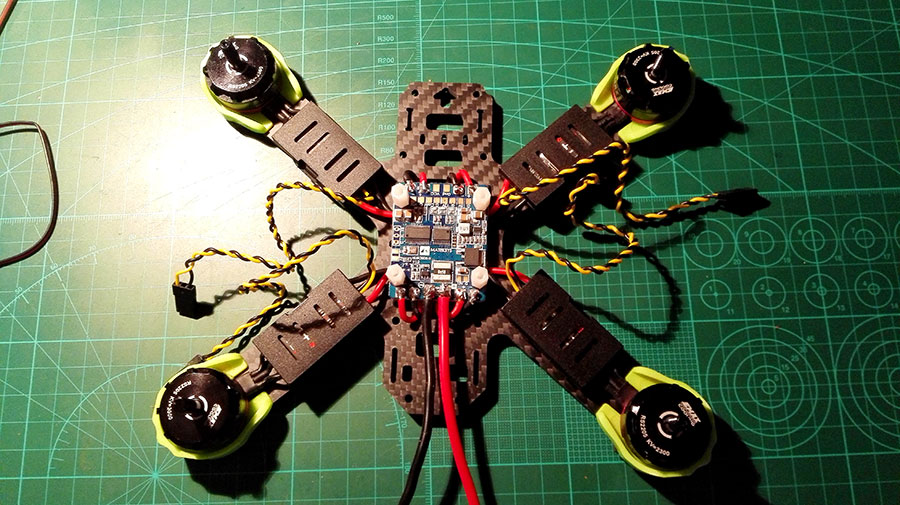
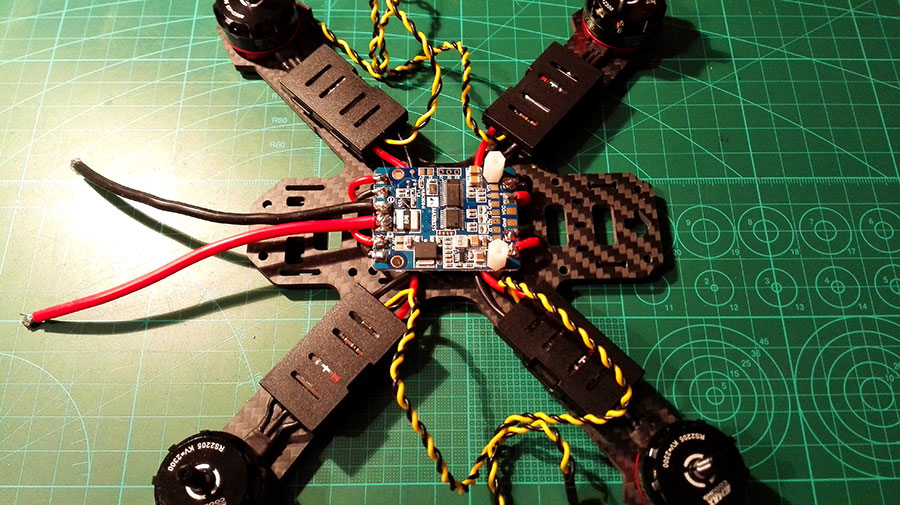
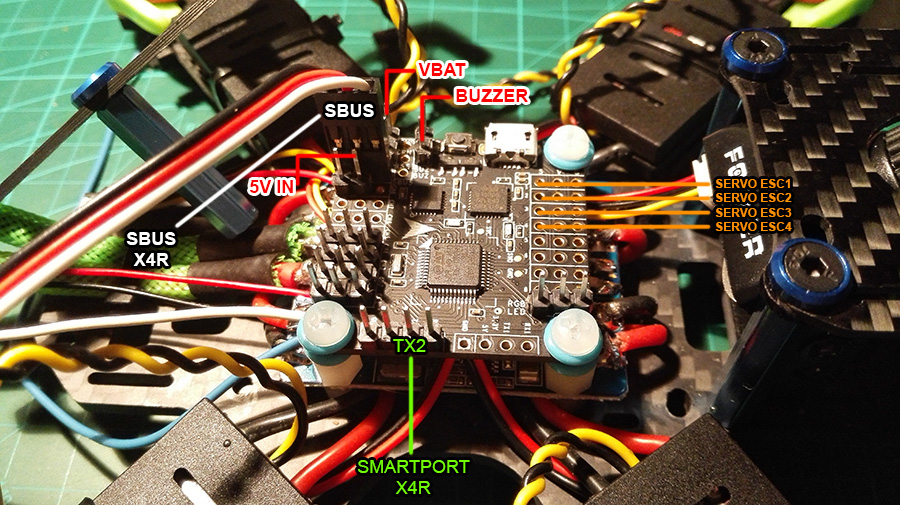
Il est temps d’attaquer les connexions sur la PDB.
Je me sert d’un des deux BEC 5V pour alimenter les 4 LEDS. L’autre BEC 5V sera dédié à l’alimentation de la X-Racer.
Le manuel de la PDB Matek conseille dans le cas où l’on a un seul câble noir (GND) sur la cam FPV :
Cam FPV GND (-) — pad (-) GND CAM
Cam FPV (+) — pad (+) BEC 12V
Cam FPV signal video — pad CAM
Pour le VTX, j’ai suivi le même principe comme je n’avais que un seul câble noir (GND).
Au final on ne connecte pas les GND de la cam et du VTX sur les pads GND des BEC, mais sur les petits pads GND placés à côté des pads CAM et VTX.
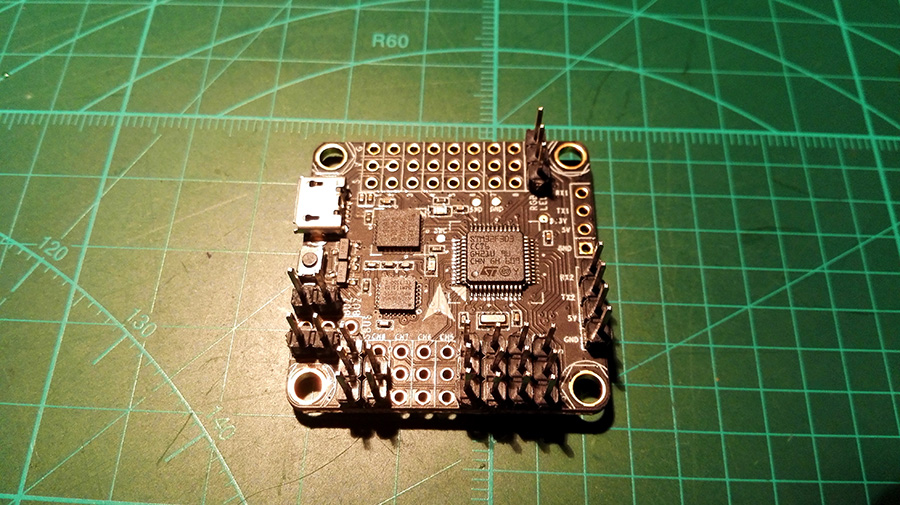
Il est temps de voir d’un peu plus près cette X-RACER F303.
Il s’agit de la V3.1, j’ai aussi une V2.1 en stock que je monterai à l’occasion sur le Lisam 210.
Avantage pour la V3.1 avec son firmware dédié (X_RACERSPI) et elle embarque un MPU6000 moins sensible aux vibration que le MPU6500 de la V2.1
Ces points forts sont:
- Mémoire flash 16MB dédiée à la Black Box
- Processeur F3 tournant à 8khz autorisant un looptime de 125us
- Gyro/Accel MPU6000
- 8 ports PWM I / 0
- Supporte le SBUS, SumH, SUMD, Xbus, PPM
- Port Buzzer
Voici le diagramme d’un build standard de la X-Racer:
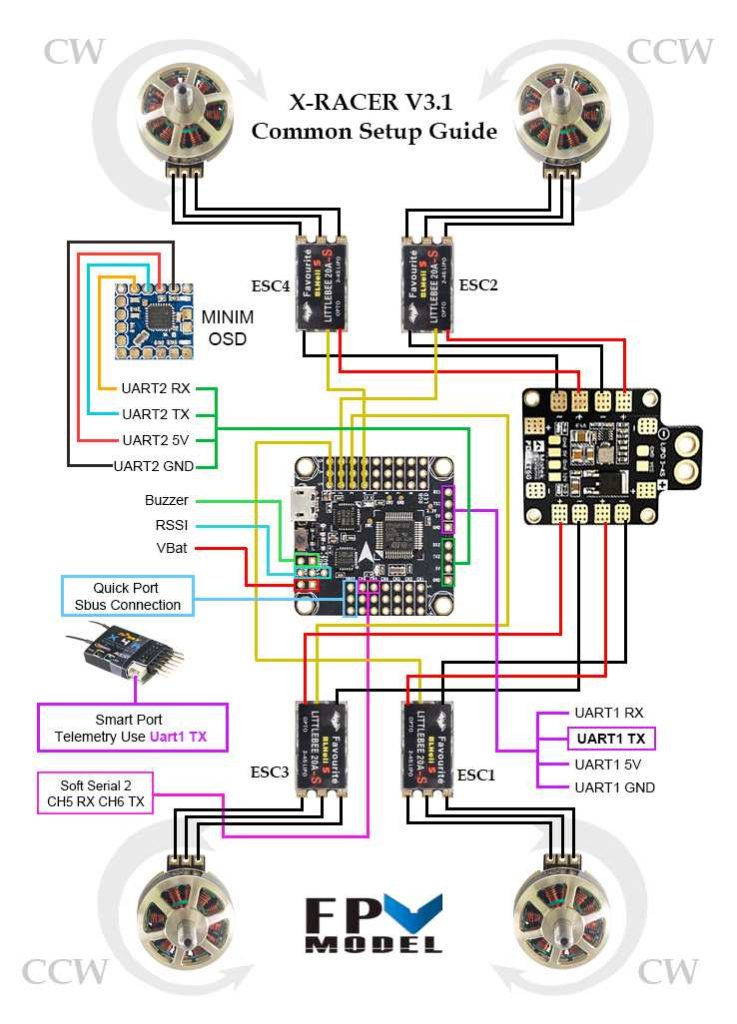
On pose la X-Racer et on en profite pour la flasher avec le firmware betaflight_3.0.0_X_RACERSPI.hex
MAJ 18/09/2016
Voilà le Emax HX 200 enfin prêt à prendre l’air !



Le style compact de ce châssis et sa rigidité apparente me plaisent beaucoup.
Toutefois le format 200mm est l’extrême limite pour embarquer des hélices 5″, il reste a peine 1 à 2mm entre les hélices avant et les entretoises !
Attention donc à tout ce qui dépasse.
Concernant les entretoises du châssis, j’ai du changer celles d’origine par des peu plus longues, pour que ca passe en hauteur sans toucher les connexion de la X-Racer.
Après coup je me rends compte que le choix du FOXEER TM200 comme VTX pour ce châssis, n’est pas vraiment judicieux:
Un peu trop encombrant et surtout il chauffe énormément, à tel point qu’il risquerai d’endommager un composant placé tropprès de lui.
Au final j’ai un peu de mal à casser le VTX et le XR4 à l’arrière du multi, sans qu’ils se touchent. Il y a vraiment très peu de place !
Mais bon je suis très satisfait du rendu général de cette frame, je sens que je vais m’éclater…ou l’éclater 🙂
MAJ 09/11/2016
Enfin le maiden du NightHawk HX 200 ! Une tenue de vol extra et bien vérouillée grâce ce nouveau châssis EMAX et les 125ms affichés par la X-Racer F303.
Que du bon !




MAJ 23/11/2016
Voilà enfin ma vidéo avec le NightHawk HX 200.
Je me suis bien appliqué sur le montage et les effets.
Merci de laisser un commentaire, si vous aimez 😉
MAJ 26/04/2017
Après plusieurs mois d’essais, je suis vraiment emballé par ce châssis du Emax HX 200.
C’est le préféré de mes racers en hélices 5″, léger, compact et très agile.
Seul regret, sans rapport avec la frame, c’est les ESC, des DYS XM30A Mini solder version.
Je dois me contenter du Oneshot125 n’ayant pas trouvé de firmware Multishot dédié.
De plus j’ai des soucis de désynchronisation avec ces ESC. Le quad peut parfois partir en vrille après une manoeuvre rapide.
Après avoir inversé physiquement le sens de 2 moteurs (plutôt que les inverser dans Blheli Suite) le problème à disparu.


MAJ 07/05/2017
J’avais envie d’upgrader mon Nighthawk HX 200 pour lui offrir de nouveaux moteurs et des ESC qui supportent le DSHOT.
Voiçi la liste des nouveaux composants :
- Moteurs : EMAX RS2205 « S »
- ESC : EMAX Bullet Series 30A
- PDB : Realacc HUBOSD ECO X
- VTX : Eachine TX526
- Divers : Entretoises M3 35mm texturées
Pour la carte de vol, je garde ma X-Racer F303 V3.1 qui me donne entière satisfaction.
Peut-être plus tard je la remplacerai par une F4 Omnibus, mais bon, vu la vitesse où ça va, il y aura sûrement mieux d’ici là 🙂
Allez c’est parti !
On commence par placer la PDB :
C’est une bonne PDB pas chère et complète avec :
- 2 BECS 5 V et 2 BECS 12V filtrés
- 4 pads ESC 30A (35A max)
- pads dédiés VTX et CAM
- Support vertical de connecteur XT60
- Supporte du 3 au 5S
- Supporte jusqu’à 140A
- OSD intégré (STOSD8)
Le petit truc en plus c’est les pads ESC judicieusement placés aux coins de la PDB.
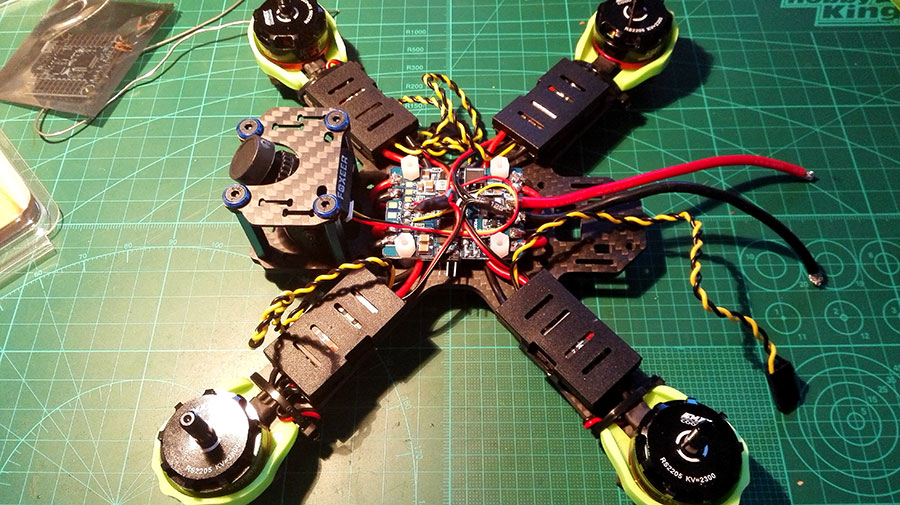
Maintenant on ajoute les ESC Bullet Series 30A:
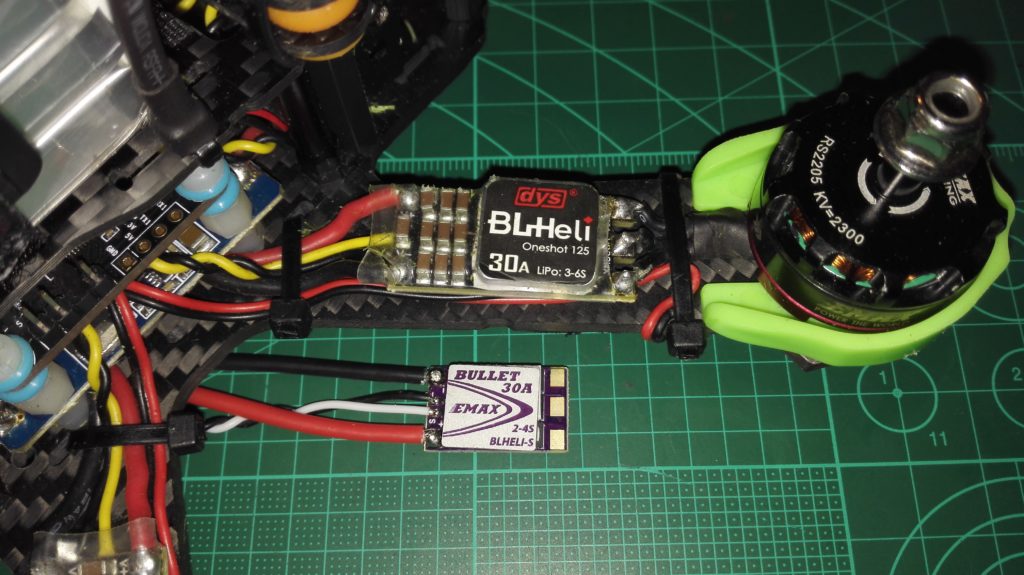
Je suis très surpris de la taille et du poids de ces ESC. Elles sont encore plus petite qu’en photo !
C’est l’idéal pour faire une économie de poids significative sur son racer.
Environ 24 grammes de gagné pour 4 ESC, par rapport à des Littlebee Spring 30A !
Je commence par poser les moteurs RS2205 « S » pour raccourcir les câbles à la bonne longueur.
Puis je soude le condensateur fourni avec la PDB sur les pads VCC et GND ainsi que 3 pins droits sur le port Série dédié à la mise à jour du STOSD8.
Ce condensateur électrolytique 25V 330uF a pour fonction de protéger les composants d’une éventuelle surtension qui pourrait les endommager.
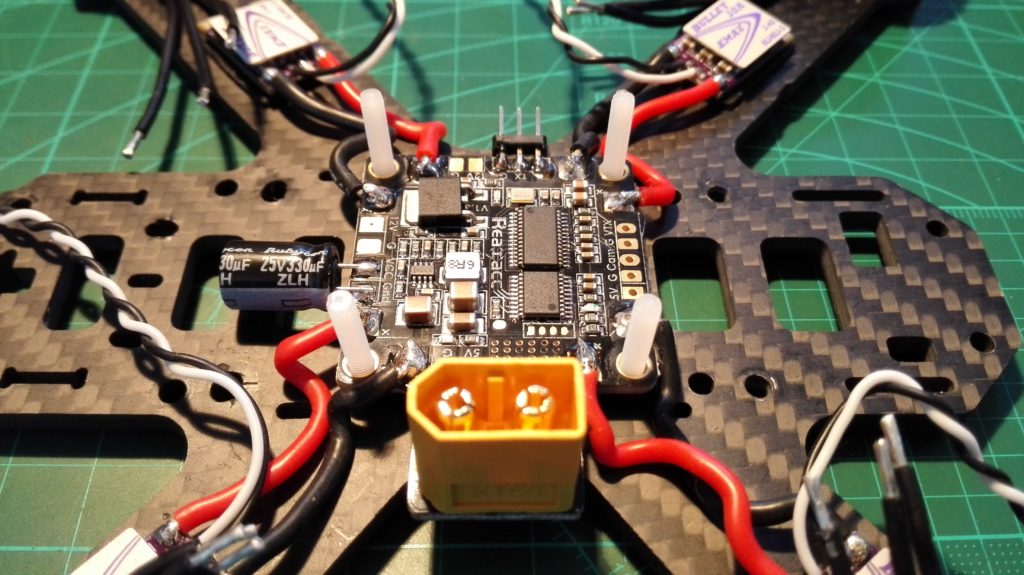
Attention à respecter la polarité du condensateur. La borne négative à souder sur le GND est généralement indiquée comme ceci :

C’est maintenant le temps de souder les câbles moteurs aux ESC tout en ayant prit le soin d’enfiler avant une gaine thermo épaisse.
Elle protégera les ESC d’éventuels coups d’hélice ou de chocs.
J’aurais aimé une gaine noire mais je n’avais qu’une transparente sous la main 🙁

Pour prévenir d’éventuels problèmes de désynchronisation des ESC, je préfère inverser physiquement les câbles moteurs plutôt que de le faire sous Blheli Suite.
J’inverse donc 2 câbles sur les moteurs N°2 et N°3.
J’utilise les deux BECS 5V pour alimenter mon faisceau de LED et la X-Racer.
J’ai pris l’habitude d’alimenter la X-Racer via son port CH6 mais on peut très bien l’alimenter par les autres ports RC input de la carte.
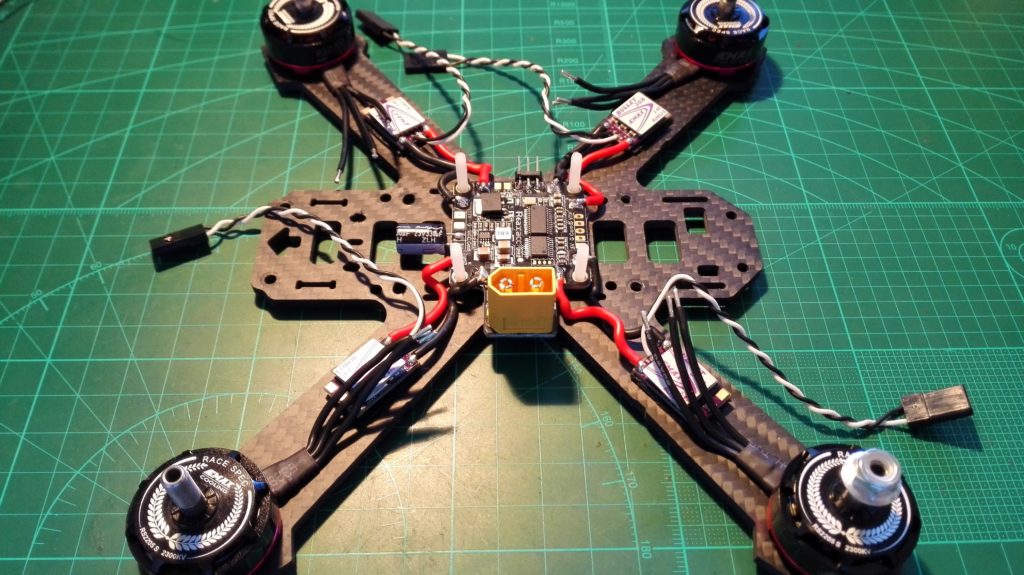
Et voilà c’est fini, le Emax HX200 est prêt à fendre l’air !





MAJ 16/07/2017
Révision complète pour le NightHawk HX 200 :
- La RunCam Swift 2 avec objectif 2.1mm remplace la Foxeer HS1189 XAM 1200 (assez deçu de cette dernière par rapport à une classique HS1177)
- Pose des entretoises 20mm d’origine. Chaud de tout faire rentrer avec si peu de hauteur, mais c’est faisable et je me suis même pu placer 8 o’ring pour isoler un peu la X-Racer des vibrations.
- Remplacement d’une bonne partie du faisceau avec des câbles silicone et inversion du sens de rotation des moteurs.
- Ajout d’un support imprimé pour la Runcam 3 made in Vertige 😉
La X-Racer affiche un looptime de 125us pour une charge CPU de 22% et la fréquence du gyro est de 8kHz pour une boucle pid de 4gHz.
Niquel pour une maniabilité et une précision accrue !
Et voilà le HX 200 de nouveau prêt à fendre l’air !




MAJ 25/09/2018
Dernières vidéos du EMAX HX 200 :
Cela fait déjà longtemps que je possède cette frame, il est temps de faire un bilan avant de monter un nouveau build peut-être en 6″ ou 7″ peut-être.
Les avantages :
- Châssis 5″ très agile et agréable à piloter, grâce à son format ultra compact en 200mm
- Châssis type unibody très solide, rien à cassé en 2 ans et de très nombreux crashs.
- Châssis rigide et bien équilibré, aucune vibration à l’image
- Convient aussi bien pour la race que le freestyle
- Léger, environ 89g
- Low profile
Les inconvénients :
- La forme ultra compacte en 200mm est aussi un inconvénient pour arriver à casser toute l’électronique, il faudra être méticuleux et patient.
- Seulement 3mm d’espace entre les hélices sur les côtés du racer, et autant entre les hélices de devant et les entretoises avant. C’est très peu mais ça passe.
- Pas de supports de cam fpv adapté, il faudra le créer vous même en pièce 3D merci Vertige 😉
- Pas la place d’embraquer une lipo de plus de 1500mAh, surtout si vous utilisez un support pour votre cam HD.
Bref après 2 ans d’utilisation, le bilan est très positif. Je n’ai pas senti le besoin de changer de châssis 5″ depuis ce temps et je pense voler encore un moment avec.
Dommage que le EMAX NightHawk HX 200 est passé relativement inaperçu et n’a pas connu un grand succès…
Découvrez mon prochain build en 7″, le GEPRC MARK 4 pour pratiquer le long range et réaliser des vidéos FPV cinématiques.

No responses yet